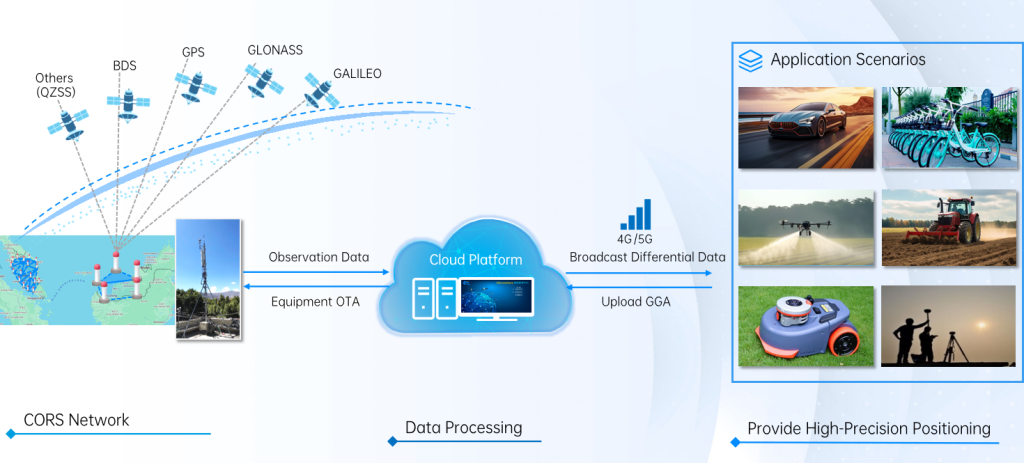
An RTK (Real-Time Kinematic) network delivers centimeter-level positioning accuracy by combining satellite data, ground reference stations, and cloud-based correction services. Here’s how it works step by step:
- CORS Network (Reference Stations)A network of Continuously Operating Reference Stations (CORS) is deployed across the coverage area. These fixed stations receive signals from all major GNSS constellations (GPS, BDS, GLONASS, Galileo, QZSS). They send raw observation data to the cloud platform.
- Cloud Data ProcessingThe cloud platform receives the observation data from CORS stations, calculates real-time differential corrections, and manages remote equipment updates (OTA). It processes errors such as satellite clock drift, atmospheric delays, and multipath interference.
- Correction Broadcast & User PositioningThe processed differential correction data is broadcast to end-user devices (rover receivers) via 4G/5G networks. The rover sends its own position data (GGA messages) back to the cloud, and the platform computes precise, corrected positions for the user.
- Application ScenariosWith centimeter-level accuracy, the network supports use cases including autonomous vehicles, shared mobility, precision agriculture, drone mapping, lawn robotics, and professional surveying.